Random product handling & vertical packing for pouches
- Application: A dedicated co-packing line for bagged snack products
- Speed: 180 products per minute
- ROI Justification: Reaching committed packaging volumes for their customer
- Unique Challenges: Achieving high rates of speed within a limited footprint, and handling randomly-oriented products and re-orienting them vertically into cases
- Important to Customer: Maintaining product integrity, along with the flexibility to easily introduce new products and cases in the future
Solved with Pearson’s Robotic Top Loader (RTL-MX)
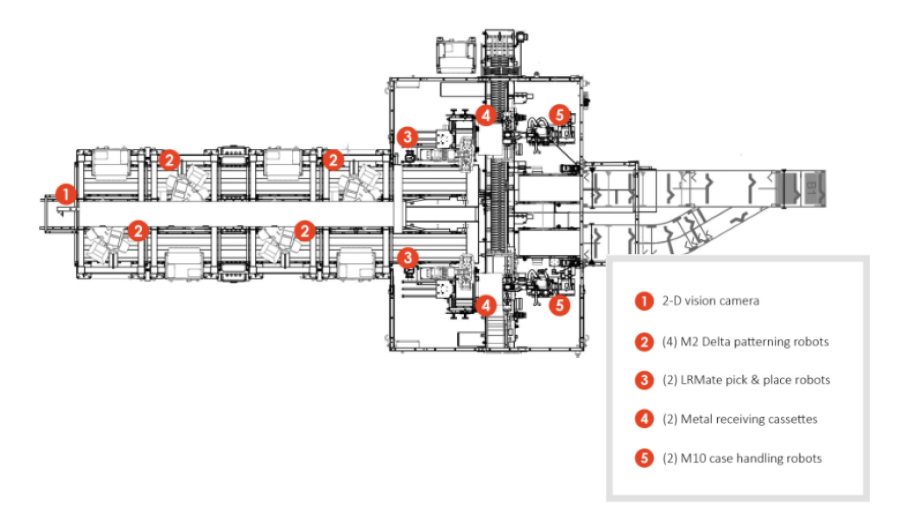
To reach the required rates within a tight footprint, centralized dual lanes are used to transport products through the cell where eight robots share the workload to form product patterns, prepare empty cases for loading, and pick and place products into the cases.
Products are received in random lay-flat orientation, and are picked in layers by two LRMate robots equipped with vacuum end-of-arm tooling and placed into two metal loading cassettes. When a case pack is complete, a servo pusher gently presses the product stack out through metal back panel flaps and into awaiting cases held on their side by two M10 robots.
In order to accommodate future product and case introductions, a dual-lane design was utilized and pre-programming work was done to proactively make product introductions as seamless as possible.
RTL-MX Capabilities
- Application: Top Load Case Packing
- Case Support: Chipboard cartons, corrugated cases, bliss boxes, trays, and warehouse totes
- Supported Pack Patterns: Vertical, horizontal, interleaved, stacked, on edge, on end, rainbow or variety packs, bulk and shelf-ready
- Speed: Application specific up to 1,500 products/min
- Controls: FANUC PMC | AB CompactLogix PLC | PanelView Color HMI
- Operation:
- Robotically using multi-axis articulated robot with MTBF of over 80,000 hours and flexibility to accommodate product changes or variations
- Application specific product handling and transfer including servo-collating, diverting, tabletop, mat top and independent cart technology
- Vision guidance and line tracking to inspect, detect, sort and manipulate products on the fly or balance the load between robots
- Continuous case motion design for higher speed applications and reduced wear
- Application-specific end-of-arm tool with optional automatic tool changeover
- Programming Language: PackML
- Safety Guarding: Fencing, light curtains or area sensors
Interested to learn more about this solution?
Click here to contact us today!